

MBM Trainee Collin Kaufman delivered a presentation at the Beckman Institute’s Graduate Student Seminar on September 5, 2018. His topic was “A Locomotor Spinobot: Engineering a Functional Spinal Cord-Skeletal Muscle Bioactuator.”
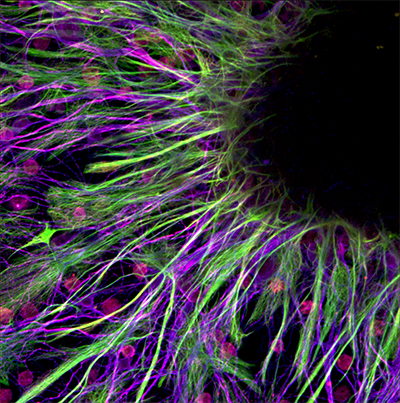
Kaufman’s research has determined that coopting preexisting motor circuits for use with bioactuators makes it possible to speed up the process of developing an autonomous biomachine, or living robot, that also maintains a lot of behavioral complexity. He and his research team used spinal cord explants to create a complex network of motor neurons and glia in vitro, allowing them to successfully innervate a muscular soft robot with an intact lumbar spinal cord segment — which galvanized the formation of neuromuscular junctions. The newly innervated muscles initially demonstrate spontaneous contractions, which can be chemically modulated by applying drugs of interest to the spinal cord.
This engineered, multicellular tissue is a key step toward autonomous soft robots capable of increasingly complex and directed behaviors. The high degree of customization inherent to this platform provides the potential for applications from traversing terrain unsafe for more traditional robots to being used as a novel tool for investigating neurodegenerative disease.
The Graduate Student Seminar series is designed to give outstanding graduate students working at the Beckman Institute an opportunity to present their research for a multidisciplinary audience. Graduate students Parinaz Fathi and Nathan Walter also presented at this event.
Kaufman’s full abstract, along with the abstracts of the other two presenters, can be found here.